Lecture 3: Feedforward Neural Networks and Backpropagation Part 1 Code
Contents
![]()
Lecture 3: Feedforward Neural Networks and Backpropagation Part 1 Code #
#@title
from ipywidgets import widgets
out1 = widgets.Output()
with out1:
from IPython.display import YouTubeVideo
video = YouTubeVideo(id=f"8sjbwfHdqW8", width=854, height=480, fs=1, rel=0)
print("Video available at https://youtube.com/watch?v=" + video.id)
display(video)
display(out1)
#@title
from IPython import display as IPyDisplay
IPyDisplay.HTML(
f"""
<div>
<a href= "https://github.com/DL4CV-NPTEL/Deep-Learning-For-Computer-Vision/blob/main/Slides/Week_4/DL4CV_Week04_Part02.pdf" target="_blank">
<img src="https://github.com/DL4CV-NPTEL/Deep-Learning-For-Computer-Vision/blob/main/Data/Slides_Logo.png?raw=1"
alt="button link to Airtable" style="width:200px"></a>
</div>""" )
Imports
import torch
import numpy as np
from torch import nn
from math import pi
import matplotlib.pyplot as plt
from mpl_toolkits.axes_grid1 import make_axes_locatable
Helper Functions for Plotting
def ex1_plot(fun_z, fun_dz):
"""
Plots the function and gradient vectors
Args:
fun_z: f.__name__
Function implementing sine function
fun_dz: f.__name__
Function implementing sine function as gradient vector
Returns:
Nothing
"""
x, y = np.arange(-3, 3.01, 0.02), np.arange(-3, 3.01, 0.02)
xx, yy = np.meshgrid(x, y, sparse=True)
zz = fun_z(xx, yy)
xg, yg = np.arange(-2.5, 2.6, 0.5), np.arange(-2.5, 2.6, 0.5)
xxg, yyg = np.meshgrid(xg, yg, sparse=True)
zxg, zyg = fun_dz(xxg, yyg)
plt.figure(figsize=(8, 7))
plt.title("Gradient vectors point towards steepest ascent")
contplt = plt.contourf(x, y, zz, levels=20)
plt.quiver(xxg, yyg, zxg, zyg, scale=50, color='r', )
plt.xlabel('$x$')
plt.ylabel('$y$')
ax = plt.gca()
divider = make_axes_locatable(ax)
cax = divider.append_axes("right", size="5%", pad=0.05)
cbar = plt.colorbar(contplt, cax=cax)
cbar.set_label('$z = h(x, y)$')
plt.show()
Gradient Descent Algorithm#
Since the goal of most learning algorithms is minimizing the risk (also known as the cost or loss) function, optimization is often the core of most machine learning techniques! The gradient descent algorithm, along with its variations such as stochastic gradient descent, is one of the most powerful and popular optimization methods used for deep learning.
Gradient vector#
Given the following function:
\begin{equation} z = h(x, y) = \sin(x^2 + y^2) \end{equation}
find the gradient vector:
\begin{equation} \begin{bmatrix} \dfrac{\partial z}{\partial x} \ \ \dfrac{\partial z}{\partial y} \end{bmatrix} \end{equation}
Hint: Use the chain rule!
Chain rule: For a composite function \(F(x) = g(h(x)) \equiv (g \circ h)(x)\):
\begin{equation} F’(x) = g’(h(x)) \cdot h’(x) \end{equation}
or differently denoted:
\begin{equation} \frac{dF}{dx} = \frac{dg}{dh} ~ \frac{dh}{dx} \end{equation}
Solution:#
We can rewrite the function as a composite function:
\begin{equation} z = f\left( g(x,y) \right), ~~ f(u) = \sin(u), ~~ g(x, y) = x^2 + y^2 \end{equation}
Using the chain rule:
\begin{align} \dfrac{\partial z}{\partial x} &= \dfrac{\partial f}{\partial g} \dfrac{\partial g}{\partial x} = \cos(g(x,y)) ~ (2x) = \cos(x^2 + y^2) \cdot 2x \ \ \dfrac{\partial z}{\partial y} &= \dfrac{\partial f}{\partial g} \dfrac{\partial g}{\partial y} = \cos(g(x,y)) ~ (2y) = \cos(x^2 + y^2) \cdot 2y \end{align}
def fun_z(x, y):
"""
Implements function sin(x^2 + y^2)
Args:
x: (float, np.ndarray)
Variable x
y: (float, np.ndarray)
Variable y
Returns:
z: (float, np.ndarray)
sin(x^2 + y^2)
"""
z = np.sin(x**2 + y**2)
return z
def fun_dz(x, y):
"""
Implements function sin(x^2 + y^2)
Args:
x: (float, np.ndarray)
Variable x
y: (float, np.ndarray)
Variable y
Returns:
Tuple of gradient vector for sin(x^2 + y^2)
"""
dz_dx = 2 * x * np.cos(x**2 + y**2)
dz_dy = 2 * y * np.cos(x**2 + y**2)
return (dz_dx, dz_dy)
ex1_plot(fun_z, fun_dz)
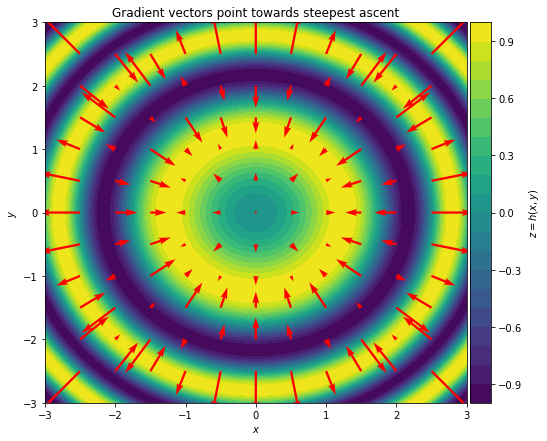
We can see from the plot that for any given \(x_0\) and \(y_0\), the gradient vector \(\left[ \dfrac{\partial z}{\partial x}, \dfrac{\partial z}{\partial y}\right]^{\top}_{(x_0, y_0)}\) points in the direction of \(x\) and \(y\) for which \(z\) increases the most. It is important to note that gradient vectors only see their local values, not the whole landscape! Also, length (size) of each vector, which indicates the steepness of the function, can be very small near local plateaus (i.e. minima or maxima).
Thus, we can simply use the aforementioned formula to find the local minima.
In 1847, Augustin-Louis Cauchy used negative of gradients to develop the Gradient Descent algorithm as an iterative method to minimize a continuous and (ideally) differentiable function of many variables.
Gradient Descent Algorithm#
Let \(f(\mathbf{w}): \mathbb{R}^d \rightarrow \mathbb{R}\) be a differentiable function. Gradient Descent is an iterative algorithm for minimizing the function \(f\), starting with an initial value for variables \(\mathbf{w}\), taking steps of size \(\eta\) (learning rate) in the direction of the negative gradient at the current point to update the variables \(\mathbf{w}\).
\begin{equation} \mathbf{w}^{(t+1)} = \mathbf{w}^{(t)} - \eta \nabla f \left( \mathbf{w}^{(t)} \right) \end{equation}
where \(\eta > 0\) and \(\nabla f (\mathbf{w})= \left( \frac{\partial f(\mathbf{w})}{\partial w_1}, ..., \frac{\partial f(\mathbf{w})}{\partial w_d} \right)\). Since negative gradients always point locally in the direction of steepest descent, the algorithm makes small steps at each point towards the minimum.
Vanilla Algorithm
Inputs: initial guess \(\mathbf{w}^{(0)}\), step size \(\eta > 0\), number of steps \(T\).
For \(t = 0, 1, 2, \dots , T-1\) do
\(\qquad\) \(\mathbf{w}^{(t+1)} = \mathbf{w}^{(t)} - \eta \nabla f \left( \mathbf{w}^{(t)} \right)\)
end
Return: \(\mathbf{w}^{(t+1)}\)
Hence, all we need is to calculate the gradient of the loss function with respect to the learnable parameters (i.e., weights):
\begin{equation} \dfrac{\partial Loss}{\partial \mathbf{w}} = \left[ \dfrac{\partial Loss}{\partial w_1}, \dfrac{\partial Loss}{\partial w_2} , \dots, \dfrac{\partial Loss}{\partial w_d} \right]^{\top} \end{equation}
PyTorch AutoGrad#
Deep learning frameworks such as PyTorch, JAX, and TensorFlow come with a very efficient and sophisticated set of algorithms, commonly known as Automatic Differentiation. AutoGrad is PyTorch’s automatic differentiation engine.
Forward Propagation#
Everything starts with the forward propagation (pass). PyTorch tracks all the instructions, as we declare the variables and operations, and it builds the graph when we call the .backward() pass. PyTorch rebuilds the graph every time we iterate or change it (or simply put, PyTorch uses a dynamic graph).
For gradient descent, it is only required to have the gradients of cost function with respect to the variables we wish to learn. These variables are often called “learnable / trainable parameters” or simply “parameters” in PyTorch. In neural nets, weights and biases are often the learnable parameters.
Buiding a Computational Graph#
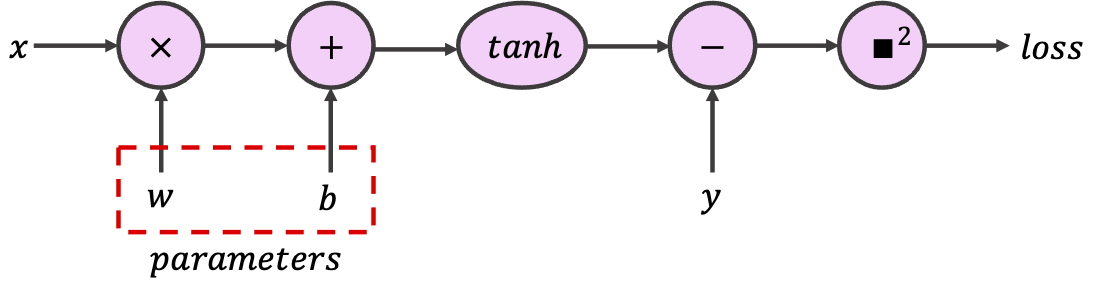
In PyTorch, to indicate that a certain tensor contains learnable parameters, we can set the optional argument requires_grad to True. PyTorch will then track every operation using this tensor while configuring the computational graph. For this code snippet, use the provided tensors to build the following graph, which implements a single neuron with scalar input and output.
class SimpleGraph:
"""
Implementing Simple Computational Graph
"""
def __init__(self, w, b):
"""
Initializing the SimpleGraph
Args:
w: float
Initial value for weight
b: float
Initial value for bias
Returns:
Nothing
"""
assert isinstance(w, float)
assert isinstance(b, float)
self.w = torch.tensor([w], requires_grad=True)
self.b = torch.tensor([b], requires_grad=True)
def forward(self, x):
"""
Forward pass
Args:
x: torch.Tensor
1D tensor of features
Returns:
prediction: torch.Tensor
Model predictions
"""
assert isinstance(x, torch.Tensor)
prediction = torch.tanh(x * self.w + self.b)
return prediction
def sq_loss(y_true, y_prediction):
"""
L2 loss function
Args:
y_true: torch.Tensor
1D tensor of target labels
y_prediction: torch.Tensor
1D tensor of predictions
Returns:
loss: torch.Tensor
L2-loss (squared error)
"""
assert isinstance(y_true, torch.Tensor)
assert isinstance(y_prediction, torch.Tensor)
loss = (y_true - y_prediction)**2
return loss
feature = torch.tensor([1]) # Input tensor
target = torch.tensor([7]) # Target tensor
simple_graph = SimpleGraph(-0.5, 0.5)
print(f"initial weight = {simple_graph.w.item()}, "
f"\ninitial bias = {simple_graph.b.item()}")
prediction = simple_graph.forward(feature)
square_loss = sq_loss(target, prediction)
print(f"for x={feature.item()} and y={target.item()}, "
f"prediction={prediction.item()}, and L2 Loss = {square_loss.item()}")
initial weight = -0.5,
initial bias = 0.5
for x=1 and y=7, prediction=0.0, and L2 Loss = 49.0
It is important to appreciate the fact that PyTorch can follow our operations as we arbitrarily go through classes and functions.
Backward Propagation#
Here is where all the magic lies. In PyTorch, Tensor and Function are interconnected and build up an acyclic graph, that encodes a complete history of computation. Each variable has a grad_fn attribute that references a function that has created the Tensor (except for Tensors created by the user - these have None as grad_fn). The example below shows that the tensor c = a + b is created by the Add operation and the gradient function is the object <AddBackward...>. Replace + with other single operations (e.g., c = a * b or c = torch.sin(a)) and examine the results.
a = torch.tensor([1.0], requires_grad=True)
b = torch.tensor([-1.0], requires_grad=True)
c = a + b
print(f'Gradient function = {c.grad_fn}')
Gradient function = <AddBackward0 object at 0x7f2bb9910610>
For more complex functions, printing the grad_fn would only show the last operation, even though the object tracks all the operations up to that point:
print(f'Gradient function for prediction = {prediction.grad_fn}')
print(f'Gradient function for loss = {square_loss.grad_fn}')
Gradient function for prediction = <TanhBackward0 object at 0x7f2bb98fa6d0>
Gradient function for loss = <PowBackward0 object at 0x7f2bb98fa510>
Now let’s kick off the backward pass to calculate the gradients by calling .backward() on the tensor we wish to initiate the backpropagation from. Often, .backward() is called on the loss, which is the last node on the graph. Before doing that, let’s calculate the loss gradients by hand:
Where \(y_t\) is the target (true label), and \(y_p\) is the prediction (model output). We can then compare it to PyTorch gradients, which can be obtained by calling .grad on the relevant tensors.
Important Notes:
Learnable parameters (i.e.
requires_gradtensors) are “contagious”. Let’s look at a simple example:Y = W @ X, whereXis the feature tensors andWis the weight tensor (learnable parameters,requires_grad), the newly generated output tensorYwill be alsorequires_grad. So any operation that is applied toYwill be part of the computational graph. Therefore, if we need to plot or store a tensor that isrequires_grad, we must first.detach()it from the graph by calling the.detach()method on that tensor..backward()accumulates gradients in the leaf nodes (i.e., the input nodes to the node of interest). We can call.zero_grad()on the loss or optimizer to zero out all.gradattributes (see autograd.backward for more information).Recall that in python we can access variables and associated methods with
.method_name. You can use the commanddir(my_object)to observe all variables and associated methods to your object, e.g.,dir(simple_graph.w).
# Analytical gradients (Remember detaching)
ana_dloss_dw = - 2 * feature * (target - prediction.detach())*(1 - prediction.detach()**2)
ana_dloss_db = - 2 * (target - prediction.detach())*(1 - prediction.detach()**2)
square_loss.backward() # First we should call the backward to build the graph
autograd_dloss_dw = simple_graph.w.grad # We calculate the derivative w.r.t weights
autograd_dloss_db = simple_graph.b.grad # We calculate the derivative w.r.t bias
print(ana_dloss_dw == autograd_dloss_dw)
print(ana_dloss_db == autograd_dloss_db)
tensor([True])
tensor([True])
References and more:#
Acknowledgements
Code adopted from the Deep Learning Summer School offered by Neuromatch Academy